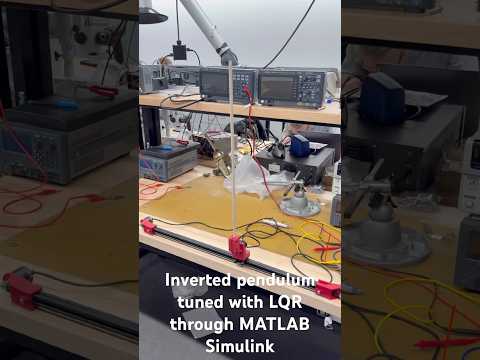
Inverted Pendulum Control System
Built a cart-pendulum testbed from first principles, linearized the dynamics, and tuned an LQR controller in MATLAB for upright stabilization. Integrated encoder feedback, Arduino-based control, and practical compensation for saturation, friction, and sensor noise.
View Project


.jpg)